| |
10.7. Роботы и манипуляторы
Применение роботов и манипуляторов позволяет комплексно механизировать и автоматизировать практически все операции по складированию, транспортированию и перегрузке различных видов грузов. На складах промышленные роботы и манипуляторы могут эффективно использоваться при перемещении грузов, загрузке и разгрузке ячеек стеллажа, различных транспортных средств на складе (конвейеров, кранов, тележек), штабелировании, укладке предметов в тару, ориентации и кантовании грузов.
Манипуляторы — это устройства, выполняющие двигательные функции, аналогичные движениям руки человека, и управляемые частично или полностью оператором. Манипуляторы с автоматическим управлением относятся к классу промышленных роботов. Они подразделяются на технологические, выполняющие операции сборки, штамповки, окраски, сварки, пайки и т.д.; подъемно-транспортные, выполняющие транспортные, погрузочно-разгрузолные и складские операции, и универсальные.
Склады оснащаются в основном подъемно-транспортными манипуляторами. В отдельных случаях могут использоваться универсальные промышленные роботы. В зависимости от грузоподъемности (кг) промышленные роботы и манипуляторы отнесены к следующим типам: сверхлегкий (0,1; 0,16; 0,25; 0,4; 0,63,1 кг); легкий (1,6; 2,5; 4; 6,3; 10 кг); средний (16; 25; 40; 63; 100 кг); тяжелый (160; 250; 400; 630; 1000 кг); сверхтяжелый (свыше 1000 кг).
Манипуляторы с ручным управлением изготавливаются в виде шарнирно-рычажного механизма, устанавливаемого на стационарной колонне (кронштейне) или тележке, перемещающейся горизонтально. Управление манипуляторами производят с пульта или при помощи пневматических рукояток.
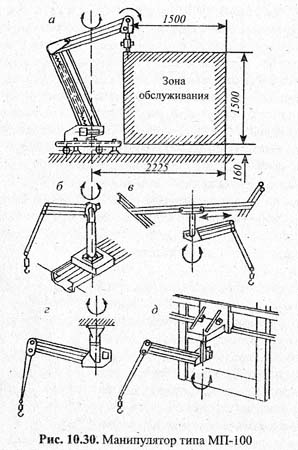
Характерным представителем группы подъемно-транспортных манипуляторов является манипулятор типа МП-100, устройство которого показано на (рис. 10.30). Манипулятор основного исполнения (рис. 10.30, а) имеет механическую тележку. Для устойчивой работы манипулятора используются выносные опоры (аутригеры).
Манипулятор состоит из силового электромеханического привода, рычажно-шарнирного сбалансированного механизма и сменного схвата. Максимальное горизонтальное и вертикальное перемещение манипулятора — 1500 мм. Манипулятор имеет несколько вариантов исполнения для установки стационарно на полу (рис. 10.30, б), на передвижной кран-балке (рис. 10.30, в), стационарно на потолочном перекрытии (рис. 10.30, г), на передвижном настенном кронштейне (рис. 10.30, д). Транспортные промышленные роботы имеют механизм горизонтального передвижения в виде рельсовой или безрельсовой тележки.
По типу привода манипулирующие устройства делят на электромеханические, гидравлические и пневматические. По способу захвата и удержания груза — на механические, электромагнитные, вакуумные и пневматические. На складе могут использоваться как универсальные подъемно-транспортные промышленные роботы, так и роботы специального назначения.
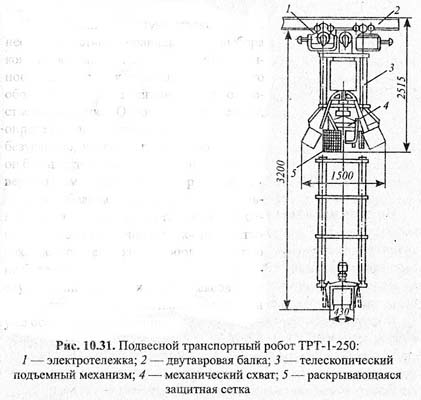
К группе роботов, перемещающихся по монорельсу, относятся роботы моделей ТРТ-1-250, МАК и МП-1. Робот ТРТ-1-250 относится к транспортным роботам. Он состоит (рис. 10.31) из подвесной электротележки, перемещающейся по ездовой балке, телескопического подъемного механизма и механического схвата.
Для обеспечения безопасности при переносе груза предусмотрена раскрывающаяся защитная сетка. Набор программы управления роботом производится клавишными переключателями. Одновременно задаются два адреса позиций транспортирования, после чего весь цикл выполняется автоматически. Для включения транспортного робота в автоматизированную транспортную систему предусмотрена возможность стыковки устройства управления с компьютером.
Мало где сейчас можно увидеть грузчиков, таскающих на себе тяжеленные мешки или ящики. Зачем надрываться целый день, перенося по 40-50 кг, когда на обычной платформенной тележке можно за один раз перевезти как минимум в 10 раз больше, а гидравлическая тележка в состоянии перемещать 2-2,5 т груза. Сегодня 60% продаж на рынке складского оборудования — обычная гидравлическая тележка, используемая для любых видов грузов и применение которой ограничено лишь человеческим фактором.
Потребитель зачастую сталкивается с необходимостью правильного выбора конкретной модели среди огромного разнообразия тележек, штабелеров и другого оборудования, предлагаемого на отечественном рынке. Основным параметром, определяющим правильность выбора, безусловно, является грузооборот -— чем он больше, тем более совершенным и универсальным должно быть оборудование.
Для небольшого магазина или маленькой производственной организации вполне достаточно обычной двух» или четырехколесной тележки грузоподъемностью не более 200 кг. Когда речь заходит об обслуживании складских комплексов или супермаркетов, то простыми тележками уже обойтись невозможно.
|
|